Industrie alimentaire
Jonker & Schut
 AVT Europe NV a construit une installation capable de traiter 800 sacs par heure.
AVT Europe NV a construit une installation capable de traiter 800 sacs par heure.
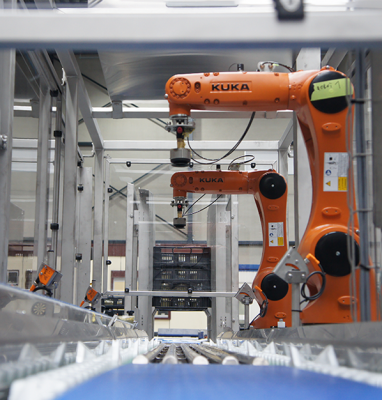
L’installation se compose de 2 robots avec un préhenseur basé sur une technologie à vide pour le désempilage de sacs de 25 kg. Chaque robot peut aussi désempiler les sacs dans 2 positions.
L’opérateur alimente en palettes l’installation via les convoyeurs à chaîne, après quoi le cycle se poursuit de manière entièrement automatique.
Afin d’atteindre une capacité suffisante et de permettre des préparations de recettes par brassage, le dispositif comprend 4 lignes d’alimentation et un total de 16 emplacements palettes.
Le système de vision intelligent de notre partenaire Fizyr détecte la position et l’orientation des sacs sur la palette. Les coordonnées exactes sont transmises et le robot KUKA peut alors désempiler les sacs et les placer sur la bande transporteuse pour la suite du procédé. Le bénéfice majeur pour notre client est que ce système par vision est totalement indépendant d’un schéma calepinage pré-enregistré des sacs. L’opérateur indique uniquement le nombre de sacs présents, et le système trouve la position et l’orientation correctes, quel que soit le calepinage. Notre client a donc une relation simplifiée avec ses fournisseurs.
Lorsque la palette est vide, une table à ciseaux la déplace vers un convoyeur en position basse pour l’évacuer.
Le robot de désempilage est une solution standardisée d’AVT Europe NV qui est toujours adaptée aux besoins des projets de nos clients.